Artificial Intelligence - Approaches to Artificial Intelligence
ATTENTION: For Q11 thru Q20 all answers must list the nodes in the order visited. A node is deemed visited if it passes goal test or is closed.
A MoveGen function and its equivalent graphical representation is given for a state-space, call it state-space 11.
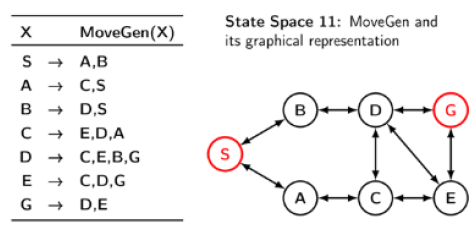 S is the start state and G is the goal state.
Maintain a CLOSED list to reconstruct the path to a goal.
Nodes returned by MoveGen that are already present in OPEN or CLOSED are not added to OPEN again.
S is the start state and G is the goal state.
Maintain a CLOSED list to reconstruct the path to a goal.
Nodes returned by MoveGen that are already present in OPEN or CLOSED are not added to OPEN again.
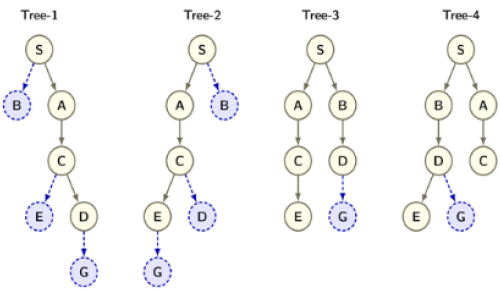
11. What is the path found, if any, by Depth First Search?
- A
(Type: String) S,A,C,E,G Sting containing all of these (AND): S, A, C, E, G


- B
(Type: String) S,B,C,E,G Sting containing all of these (AND): S, B, C, E, G
- C
(Type: String) S,A,C,D,G Sting containing all of these (AND): S, A, C, D, G
- D
(Type: String) S,A,B,E,G Sting containing all of these (AND): S, A, B, E, G
ATTENTION: For Q11 thru Q20 all answers must list the nodes in the order visited. A node is deemed visited if it passes goal test or is closed.
A MoveGen function and its equivalent graphical representation is given for a state-space, call it state-space 11.
S is the start state and G is the goal state.
Maintain a CLOSED list to reconstruct the path to a goal.
Nodes returned by MoveGen that are already present in OPEN or CLOSED are not added to OPEN again.
ATTENTION: For Q11 thru Q20 all answers must list the nodes in the order visited. A node is deemed visited if it passes goal test or is closed.
A MoveGen function and its equivalent graphical representation is given for a state-space, call it state-space 11.
S is the start state and G is the goal state.
Maintain a CLOSED list to reconstruct the path to a goal.
Nodes returned by MoveGen that are already present in OPEN or CLOSED are not added to OPEN again.
ATTENTION: For Q11 thru Q20 all answers must list the nodes in the order visited. A node is deemed visited if it passes goal test or is closed.
A MoveGen function and its equivalent graphical representation is given for a state-space, call it state-space 11.
S is the start state and G is the goal state.
Maintain a CLOSED list to reconstruct the path to a goal.
Nodes returned by MoveGen that are already present in OPEN or CLOSED are not added to OPEN again.
- A
(Type: String) S,S,A,B,S,A,C,B String containing all of these (AND): S, S, A, B, S, A, C, B
- B
(Type: String) S,S,A,B,S,A,S,B String containing all of these (AND): S, S, A, B, S, A, S, B
- C
(Type: String) S,S,A,B,A,C,B String containing all of these (AND): S, S, A, B, A, C, B
- D
(Type: String) S,S,A,B,S,A,B,C String containing all of these (AND): S, S, A, B, S, A, B, C
ATTENTION: For Q11 thru Q20 all answers must list the nodes in the order visited. A node is deemed visited if it passes goal test or is closed.
A MoveGen function and its equivalent graphical representation is given for a state-space, call it state-space 11.
S is the start state and G is the goal state.
Maintain a CLOSED list to reconstruct the path to a goal.
Nodes returned by MoveGen that are already present in OPEN or CLOSED are not added to OPEN again.
